Newsroom
Geometric Tolerances of Deep Groove Ball Bearing and ISO 492 Standard
2025-12-24  The geometric tolerance of deep groove ball bearing refers to the allowable deviation range between the actual shape, orientation, and position of key geometric elements of the bearing (such as inner and outer ring raceways, end faces, inner/outer diameter cylindrical surfaces, etc.) and the designed ideal shape, orientation, and position. It is a core technical indicator for measuring the machining accuracy and assembly adaptability of bearings.
The geometric tolerance of deep groove ball bearing refers to the allowable deviation range between the actual shape, orientation, and position of key geometric elements of the bearing (such as inner and outer ring raceways, end faces, inner/outer diameter cylindrical surfaces, etc.) and the designed ideal shape, orientation, and position. It is a core technical indicator for measuring the machining accuracy and assembly adaptability of bearings.
These tolerances directly affect the rotational accuracy, operation stability, load distribution uniformity of the bearing, as well as the fitting effect with the shaft and bearing housing. The following is a detailed explanation of the core geometric tolerance items for deep groove ball bearings:
1. Dimension Tolerance
- Inner Diameter Tolerance: The dimensional deviation of the inner diameter of the deep groove ball bearing inner ring when mated with the shaft, which determines the interference/clearance fit accuracy. Common tolerance classes (such as P0, P6, P5, P4) correspond to different deviation ranges.
- Outer Diameter Tolerance: The dimensional deviation of the outer diameter of the bearing outer ring when mated with the bearing housing, which affects the installation stability of the bearing in the housing bore.
- Width Tolerance: The deviation of the overall width of the bearing (including inner and outer rings), which ensures the axial positioning accuracy of the bearing in the assembly space.
As the basis of geometric tolerance, it refers to the deviation limit for the key dimensions of the deep groove ball bearing. 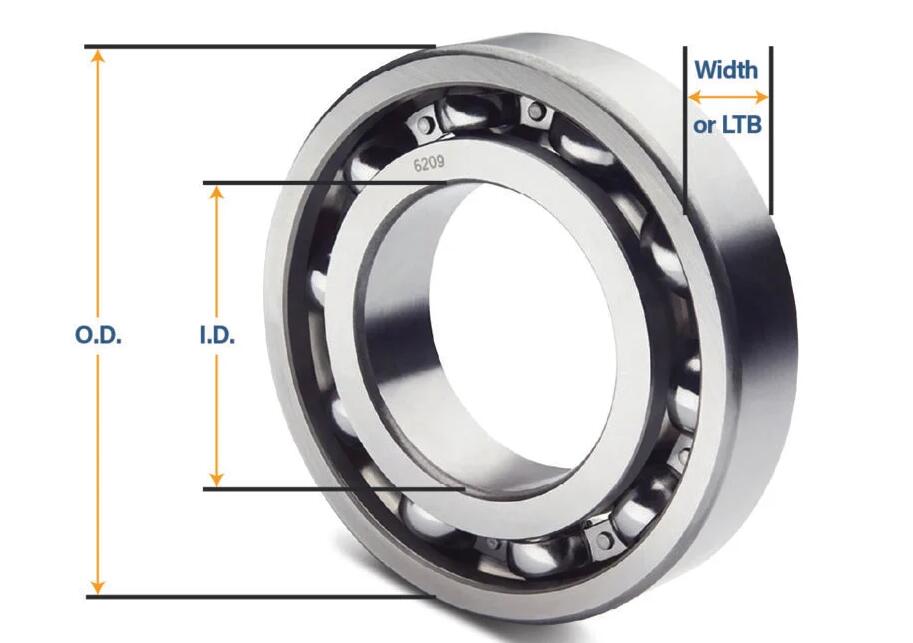
2. Form Tolerance
- Circularity: The degree to which the cross-sectional profile of the inner and outer ring raceways and the inner/outer diameter cylindrical surfaces deviates from an ideal circle. Excessive circularity error will cause vibration and noise when the bearing rotates.
- Cylindricity: The shape deviation of the inner/outer diameter cylindrical surface along the axis direction, which integrates circularity and straightness errors to ensure uniform contact between the bearing and the shaft as well as the housing bore.
- Raceway Profile Tolerance: The deviation between the actual surface of the raceway and the designed ideal arc surface, which directly affects the contact stress distribution between the rolling elements and the raceway, and is related to the bearing capacity and service life of the bearing.
It limits the irregularity of the shape of a single geometric element and has no datum requirement.
3. Orientation Tolerance
- Perpendicularity: The perpendicular deviation between the bearing end face and the inner/outer ring axis. Poor end face perpendicularity will lead to uneven axial force after bearing installation and cause additional friction.
- Parallelism: The parallel deviation between the center planes of the inner and outer ring raceways, which ensures the uniform rolling of rolling elements on the raceway and avoids eccentric load.
It controls the orientation deviation of geometric elements relative to the datum, with clear datums (usually the bearing end face or axis).
4. Position Tolerance
- Coaxiality: The coincidence deviation between the axis of the inner and outer ring raceways and the axis of the bearing inner/outer diameter. Excessive coaxiality error will increase the radial runout when the bearing rotates and reduce the rotational accuracy.
- Radial Runout: Divided into inner ring radial runout (Kia) and outer ring radial runout (Kea), it refers to the maximum and minimum radial dimension difference of the raceway surface when the inner and outer rings rotate relative to each other under no load. It is a key indicator for measuring the rotational accuracy of the bearing and directly affects the operation accuracy of the equipment (such as the stable rotation of the motor rotor).
It controls the position deviation of geometric elements relative to the datum, affecting the coaxiality and assembly accuracy of the deep groove ball bearing. 
5. Runout Tolerance
- Axial Runout: The maximum and minimum axial displacement difference of the bearing end face during rotation, which affects the axial positioning accuracy of the bearing and is applicable to scenarios with strict requirements on axial movement (such as machine tool spindles).
It is a comprehensive tolerance that includes form and position errors, divided into radial runout and axial runout.
Tolerance Class Corresponding Standards
The geometric tolerances of deep groove ball bearing shall comply with the international standard ISO 492 or the national standard GB/T 307.1. The tolerance classes are divided from low to high into P0 (ordinary class), P6 (precision class), P5 (high precision class), P4 (ultra-high precision class), P2 (top precision class). The higher the class, the narrower the geometric tolerance range, the higher the machining difficulty and cost, and it is suitable for high-precision and high-speed equipment (such as precision machine tools and high-speed motors).
