QIBR cross roller bearings were delivered to our customer in Cologne, Germany, to improve the flexibility and work efficiency of robot arm joints
- Continent
- Europe
- Country
- Germany
- Date
- 2016-02-08
- Categories
-
Cross Roller Bearing
- Applications
- Robot arm joints
Products Used
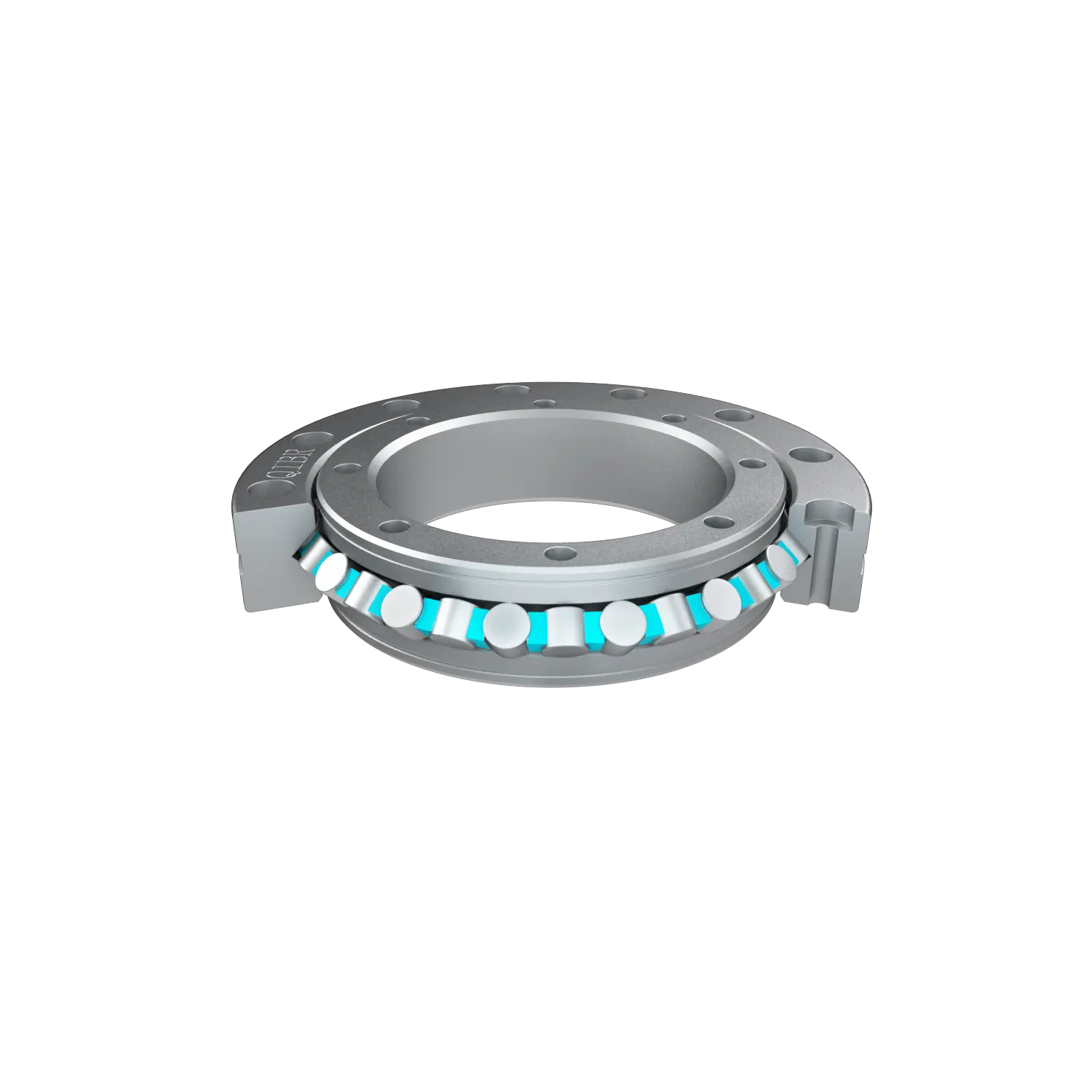
Cross roller bearing
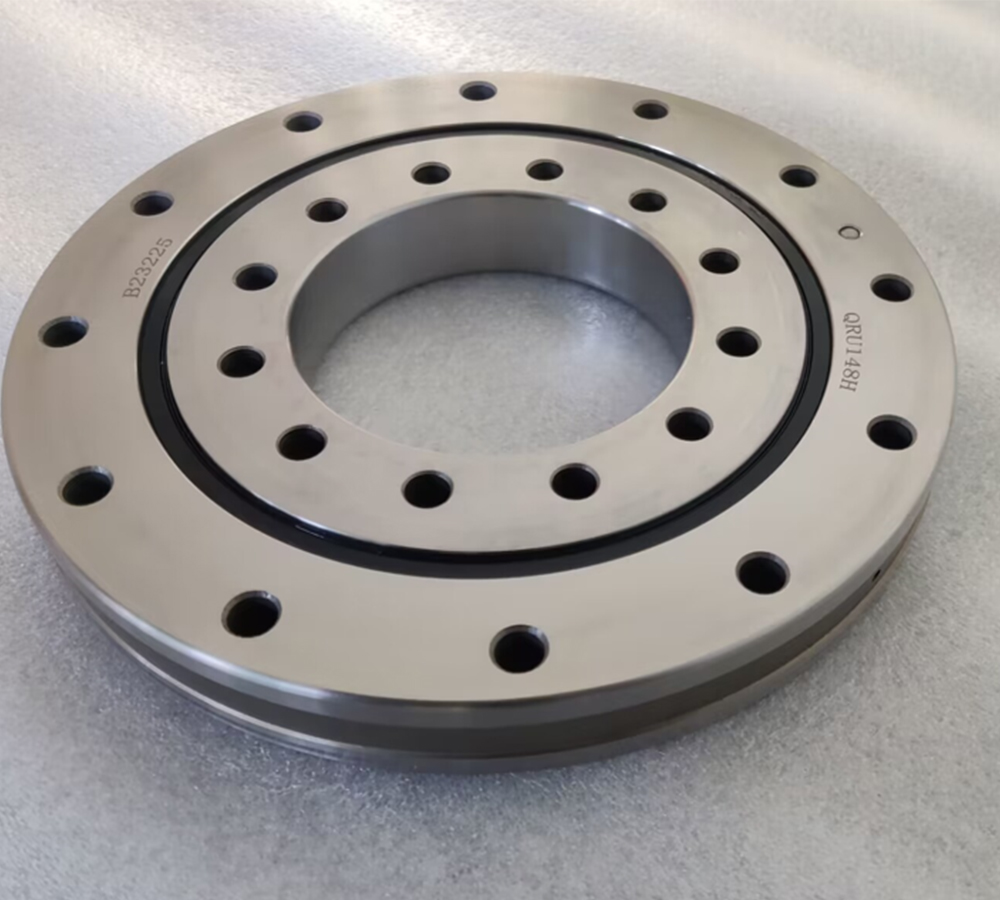
1. High load - bearing capacity : The rolling elements of the QRU148 cross roller bearings are cylindrical rollers arranged in a cross pattern. This allows a single bearing to simultaneously withstand multi-directional loads such as radial loads, axial loads, and overturning moments. The rollers are arranged crosswise at 90°. This structure greatly improves the bearing's load capacity and can maintain stability under high load conditions, making it suitable for use in the joints of robot arms.
2. Excellent durability and reliability : The QRU148 cross roller bearing is made of high-strength steel, which enhances the overall rigidity of the bearing, so that it will not deform significantly when subjected to high loads. It can maintain good stability and performance when the robot arm performs complex movements.
3. Superior rotation accuracy : The manufacturing accuracy of the QRU148 cross roller bearings is high, and the clearance between the rollers is strictly controlled within a very small range. Small clearance enables the bearing to maintain stability and accuracy during operation, ensuring high precision of the bearing during operation, and enabling precise positioning and control.
Additional Notes:
The German customer decided to purchase QRU148 cross roller bearings from QIBR to replace NACHI bearings in order to improve the flexibility and work efficiency of the robot arm joints. The QRU148 cross roller bearing is suitable for medium to high speed applications. The optimized structure enables the QRU148 cross roller bearing to maintain stable performance at high speed rotation, meeting the customer's strict requirements in terms of accuracy, load capacity and service life. This is especially important for robot arm movements that require fast response, allowing the robot arm joints to flexibly respond to various tasks in a dynamic environment.

Related Customer Delivery Records

QlBR tapered roller bearings and spherical roller thrust bearings are delivered to customers in Salvador, Brazil, to improve the bearing capacity of ship propellers

The crossed roller bearings of QIBR were delivered to the customer in Jakarta, Indonesia, to improve the precise positioning and stability of the medical X-ray machine.

The plain bearings and deep groove ball bearings of QIBR were delivered to the customer in Leeds, UK, to improve the safety and stability of the continuous casting machine

The QIBR angular contact ball bearings and sliding bearings were delivered to the customers in Setúbal, Portugal, to enhance the stability and load-bearing capacity of cycloidal reducers
The QIBR precision cylindrical roller bearings were delivered to the customers in Brussels, Belgium, to enhance the rigidity and precision of the grinding spindles of machine tools

The QIBR slewing bearings were delivered to the customers in Vancouver, Canada, to enhance the stability and durability of rotary drilling rigs

The slewing bearings of QIBR were delivered to a customer in Montreal, Canada, to enhance the stability and durability of the blow molding machine

The slewing bearings of QIBR were delivered to the customer in Lyon, France, to improve the smoothness and load-bearing capacity of the disc feeder

The slewing bearings of QIBR were delivered to the customer in Mumbai, India, to improve the smoothness and durability of the fire truck

The slewing bearings of QIBR were delivered to the customer in Munich, Germany, to improve the stability and durability of the belt feeder
